
Infrarotabstandssensoren
Relevanz der Thematik

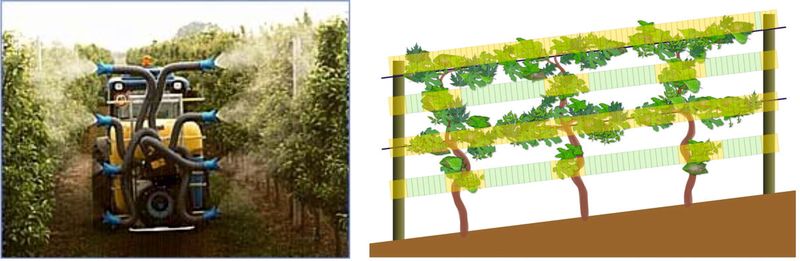
Im Wein- und Obstbau werden zur Sicherung des Ertrages teuere und teils umweltbelastende Pflanzenschutzmittel eingesetzt. Folglich sollte der Einsatz dieser Spritzmittel aus ökologischen und ökonomischen Gründen auf ein Minimum reduziert werden. Dazu muss die optimale Ausbringmenge des jeweiligen Mittels bestimmt werden. Diese Menge ist stark von dem aktuellen Entwicklungsstadium der Pflanzen abhängig, d. h. von der im aktuellen Wuchsstadium vorhandenen Blattfläche, die auch als Laubwand bezeichnet wird. Im optimalen Fall soll die Spritzmittelmenge bei jeder Behandlung der Pflanzen neu ermittelt werden.
Problem
Aus wirtschaftlichen Gründen werden die Nutzpflanzen in parallelen Reihen gepflanzt, wobei jeweils ein Weg für die landwirtschaftlichen Fahrzeuge frei bleibt. Für eine optimale Dosierung der Pflanzenschutzmittel wird durch die Bestimmung der Zielfläche, sprich der vorhandenen Blattfläche, die Dosiermenge festgelegt. Dazu werden verschiedene Verfahren eingesetzt. Üblicherweise wird die benötigte Ausbringmenge pro Zeit über die Geschwindigkeit des eingesetzten Fahrzeuges und über das dichteste Laubwandvolumen bestimmt. Dieses Verfahren ist einfach, jedoch ermittelt es eine zu hohe Menge des Pflanzenschutzmittels, das über die ganze Laubwand verteilt wird. In der Laubwand befinden sich aber auch blattfreie Stellen, die bei den o.g. Verfahren nicht berücksichtigt werden können. Daher wird in diesen Bereichen das Pflanzenschutzmittel ebenfalls versprüht und damit sinnlos verbraucht. Um den unnötigen Verbrauch des Sprühmittels zu minimieren, wurde im Rahmen dieses Projektes ein Sensor entwickelt, der eine solche Lückendetektion durchführen kann und eine gezielte Ansteuerung der Sprühdüsen ermöglicht.
Sensorsystem
Anforderungen an den Sensor
- Maximale Arbeitsgeschwindigkeit: 10 km/h (entspricht 2,78 m/s)
- Eine Messung soll alle 5 cm erfolgen: das ergibt maximal 56 Messungen pro Sekunde
- Strukturen von über 5 mm Dicke (kahle und belaubte Äste) sollen erkannt werden
- Zu erkennende Lückengröße: mehr als 30 cm
- Sichere Funktionsweise bei Tageslicht, Dämmerung und Dunkelheit
- Robustheit gegenüber Verschmutzung und Vibration
- Geringer Preis
Sensoraufbau
Der Sensor funktioniert nach dem Prinzip des Reflexionslichttasters durch Erfassung des von der Laubwand zurückgeworfenen Infrarotlichtes. Mehrere Leuchtdioden mit relativ kleinem Strahlwinkel von 3 Grad wurden in Reihen auf zum Teil drehbaren Halterungen platziert. Das emittierte Licht lässt sich auf eine entfernte Linie fokussieren, so dass genügend Intensität als Reflex vom Laub zum Sensor gelangt. Die drehbaren Halterungen dienen dazu, den Kreuzpunkt der Lichtstrahlen von allen Reihen auf einen bestimmten Abstand einzustellen. Dieser Abstand soll etwa dem Abstand zwischen dem am Fahrzeug befestigten Sensor und der Laubwand entsprechen. Die IR-Dioden werden mit einem gepulsten Strom angetrieben, um eine hohe Spitzenlichtleistung und damit eine große Reichweite zu ermöglichen. Das reflektierte Licht wird durch Photodetektoren empfangen. Diese Photodetektoren sind mit einer zusätzlichen Linse ausgerüstet, um das empfangene Licht zu fokussieren. Die Elektronik besteht aus zwei Schaltungen, eine für die Sende- und eine für die Empfangseinheit. Die spezifizierte Abstanderfassung in einem Bereich von 70 bis 100 cm für die sichere Lückenerkennung in Laubwänden konnte mit diesen Maßnahmen gewährleistet werden.
Nachtrag
Nach mehreren Versuchen mit dem ersten Aufbau des Sensors wurde das gesamte Aufbaukonzept zum größten Teil überarbeitet. Es wurden mehrere Verbesserungen durchgeführt, die einen einfacheren mechanischen Aufbau des Sensors erlauben. Die Steuerelektronik wurde kompakt auf einer einzigen Platine integriert. Neben der Reichweite konnte damit auch die Kosteneffizient weiter gesteigert werden. Gleichzeitig wurde der Stromverbrauch des Sensors um fast 40% reduziert.

